UPDATE Sept 2008 - An information pack with
software, user guides, wiring diagrams and flash programs is now
available for the Wi-Fi bot, click here -
Information Pack.
The BFF Wi-Fi Bot is my first attempt at robot building
so you'll need to excuse its appearance. Over the years I've bought lots
of parts and components from robot builder suppliers for the electric
vehicles on the site but I've never actually used any of them in a
robot.
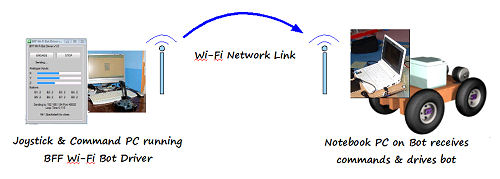
The BFF Wi-Fi Bot, as its name suggests, is a robot that can be remotely
controlled over your standard home Wi-Fi network from a joystick
attached to a fixed PC. It uses a small on-board notebook style laptop
computer to do this, however if you do not have an spare laptop it could
be driven using
wireless serial links from the
fixed PC. The usual form of remote robot control uses RC transmitters
and receivers but wireless networks are becoming increasingly common in
homes everywhere and I thought I'd try this. The transmission protocols
used should allow the robot to be driven over the wider internet but I
haven't tried this yet.
Wi-Fi Robot Indoors 1
Wi-Fi Robot Indoors 2
Wi-Fi Robot Outdoors
The bot is a simple 4 wheel drive, skid steered machine which makes its
mechanical construction fairly simple. It also gives the bot great
manoeuvrability with good forward and reverse control and the ability to
spin on the spot – watch the movie clips above.
The speed, direction and turn commands that control the
robot are obtained from a standard joystick on the fixed PC. Driver
software running on the PC sends this data over the wireless network to
a notebook or laptop PC carried on the robot which converts the commands
into serial data to send to the controllers on the bot. More details of
the system are on Page 2.
 The
state of buttons on the joystick are also transmitted and this data can
be used to control other functions on the bot – on this machine they are
used to drive the camera pan and tilt. One benefit of using the Wi-Fi
approach is that the notebook/laptop on the robot can also handle the
robot vision through a standard webcam and transmit this back over the
network to the driving PC. Driving the robot using the on board camera
is great fun if a bit tricky – more later.
The
state of buttons on the joystick are also transmitted and this data can
be used to control other functions on the bot – on this machine they are
used to drive the camera pan and tilt. One benefit of using the Wi-Fi
approach is that the notebook/laptop on the robot can also handle the
robot vision through a standard webcam and transmit this back over the
network to the driving PC. Driving the robot using the on board camera
is great fun if a bit tricky – more later.
Skid steering takes up more power than conventional
steering methods and the bot is adequately powered - driven by two
inexpensive 250W electric motors. The drive is geared down using two
stage roller chain reductions to generate the wheel torque required to
drag the wheels in the skid turns. All four wheels are driven to give
traction and effective turning on a variety of surfaces. The power
source is two 12V batteries wired in series to give 24V.
 The
logic supply to the control electronics and servos is through a BEC unit
(battery eliminator circuit). An onboard supply for the laptop could be
rigged up using a car style charger.
The
logic supply to the control electronics and servos is through a BEC unit
(battery eliminator circuit). An onboard supply for the laptop could be
rigged up using a car style charger.
The performance of the robot is pretty good - have a look at the video
clips. There is little noticeable delay in the joystick control movement
and the robot's response. Speed and direction is smoothly controlled and
is responsive to the joystick positioning. When the bot is within line
of sight it is easy to drive, when it goes out of sight and you need to
rely on the view from the onboard webcam the fun begins! See
page 2 for
the vision system.
Not quite a NASA remote Mars rover but not bad for a DIY effort. For
more details of the control system and vision setup see Page 2.
Go to Page 2......
 I hope to publish detailed plans and information on
wiring, PICAXE programming and driver software before long so call back
to keep updated.......
I hope to publish detailed plans and information on
wiring, PICAXE programming and driver software before long so call back
to keep updated.......