My
experience of using RC (radio control) style Servos is
fairly limited and recently acquired, and I have to
admit to previously having some confusion in my mind
about these devices and their relationship with servo
motors and servo drives more generally.
My
experience of using RC (radio control) style Servos is
fairly limited and recently acquired, and I have to
admit to previously having some confusion in my mind
about these devices and their relationship with servo
motors and servo drives more generally.
Servo
motors are a type of electric motor designed to be used
as part of a larger servo control system, often using
closed loop control methods. These mainstream “servo”
systems are widely used in industry to drive loads of
various kinds and sizes with good control over the
driven motion – for example by effectively controlling
the position, speed or acceleration of the moving load.
The RC
style Servo is, however, not an electric motor, although
it does contain one – it is effectively an entire
position feedback closed loop control system packaged in
a compact casing. They contain the electric drive motor
(usually DC PM) with mechanical reduction gearing, position
feedback sensor and the closed loop control and motor
drive electronics. The drive output is usually via a
limited rotation shaft (to which various torque arms can
be fitted) and the input signal is a position demand
signal where the required position is encoded in a
series of length controlled low voltage pulses.
The range
of available RC servos is mind boggling, especially to a
beginner such as me. Physical size, output torque, speed
of movement, range of movement, position resolution,
backlash and build quality seem to be the main
parameters that differentiate the available choices. I
did find a fair amount of information on the web about
the use of RC servos in different applications and that
helped in making buying choices - do
your own search to
see.
 Generally
they are not large devices, the above image shows a
Hitec HS-815BB “Mega Sail Servo” which, with an output
torque of about 25 kg.cm (~2.5 Nm). This is pretty much
at the top of the available torque output range. There
are a few industrial sized servos around but these are
much more expensive. The torque arm on the Hitec has a
limited working travel of about +/- 90°
(mechanical travel is larger) and has a no-load speed of
about 0.14 sec/60° when working at 6V.
Generally
they are not large devices, the above image shows a
Hitec HS-815BB “Mega Sail Servo” which, with an output
torque of about 25 kg.cm (~2.5 Nm). This is pretty much
at the top of the available torque output range. There
are a few industrial sized servos around but these are
much more expensive. The torque arm on the Hitec has a
limited working travel of about +/- 90°
(mechanical travel is larger) and has a no-load speed of
about 0.14 sec/60° when working at 6V.
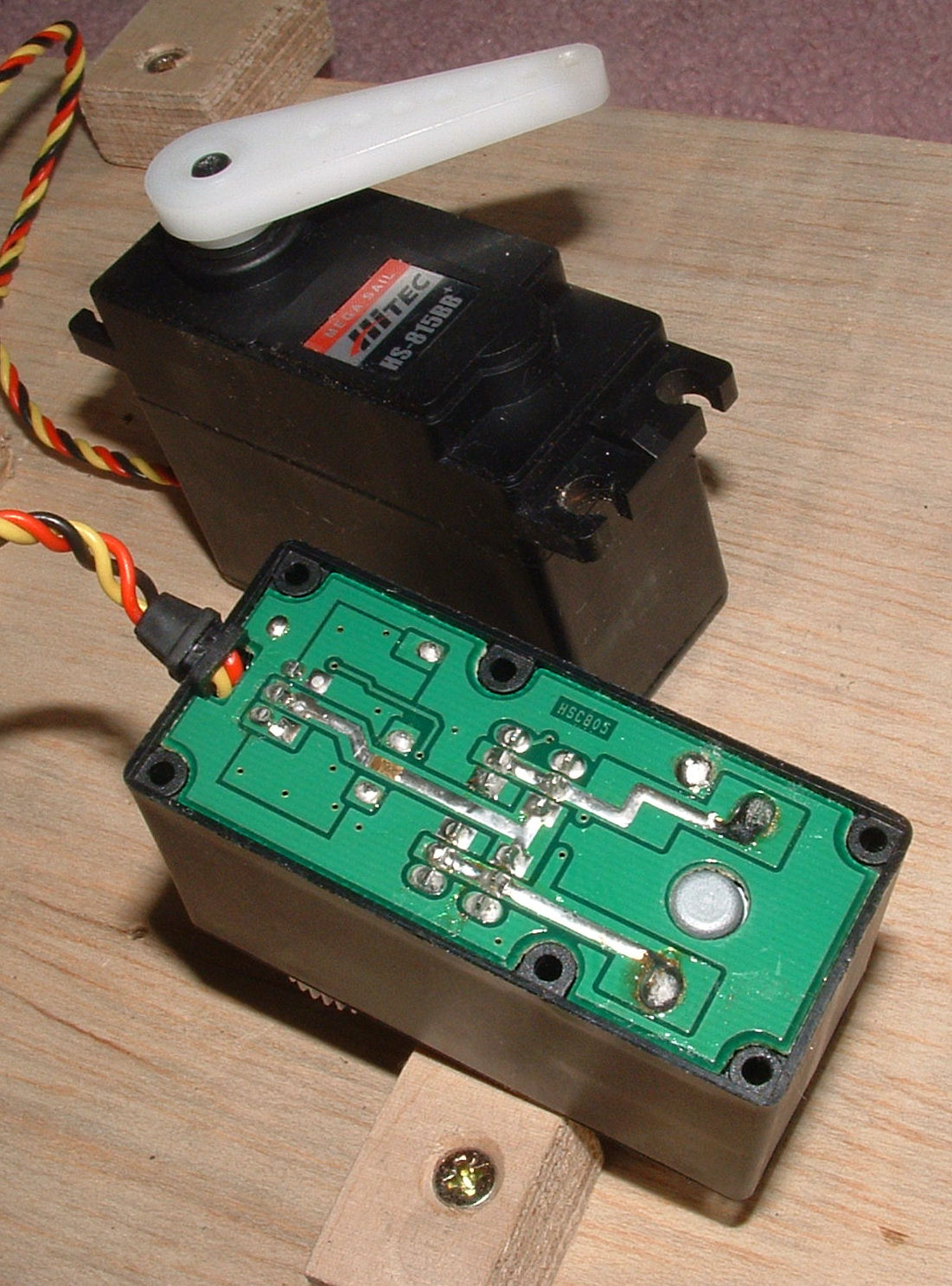
The image right
shows the servo with the top cover removed. You can see
the built in geared transmission – in this case a
5-stage reduction using plastic straight spur gears to
reduce the high motor shaft speed to the approx 1 rev/s
needed at the output shaft. This servo also has a ball
bearing mounted final drive shaft although less
expensive units may use plain bearings. The second image
below shows the base of the servo removed where the PCB
of the drive electronics can be seen. The drive motor
and position feedback potentiometer lie within the
casing. The gear train is of good quality and there is
very little backlash noticeable at the torque arm even
with the relatively large number of reduction stages.
 So
they are capable of fairly high speed motion over a
limited range of travel. The speed of motion will slow
at higher loads and when the applied load is too high
the drive motor will stall. My interest in using this
servo was for a joystick force feedback project and for
this type of work where a smooth, vibration-free
movement under load is required the servo is not an
ideal solution. Under load the arm vibrates very
slightly at the refresh frequency of the internal
position control loop and this can be felt. For many
less sensitive positioning applications the device would
perform satisfactorily. This particular RC servo can be
driven fairly easily from the torque arm when it is not
powered, this is probably down to the straight spur gear
transmission - other servos with other types of geared
transmissions may not be so easily back-driven.
So
they are capable of fairly high speed motion over a
limited range of travel. The speed of motion will slow
at higher loads and when the applied load is too high
the drive motor will stall. My interest in using this
servo was for a joystick force feedback project and for
this type of work where a smooth, vibration-free
movement under load is required the servo is not an
ideal solution. Under load the arm vibrates very
slightly at the refresh frequency of the internal
position control loop and this can be felt. For many
less sensitive positioning applications the device would
perform satisfactorily. This particular RC servo can be
driven fairly easily from the torque arm when it is not
powered, this is probably down to the straight spur gear
transmission - other servos with other types of geared
transmissions may not be so easily back-driven.
There are
many proprietary RC servo controllers available to drive
RC servos. Depending on type these can be interfaced
with standard radio control receivers, several types of
micro controller or to USB or serial ports on a PC, so
the range of control options is fairly large. The image
below shows a Pololu 16 Servo Serial controller which I
used to drive the servos from a PC.